New Security Threat for Self-Driving Cars: Invisible Road Obstacles
On May 14, 2021, a self-driving taxi stopped dead in its tracks when it became confused by traffic cones on the road. In a statement, the company noted that “while the situation was not ideal, the [autonomous] Waymo Driver operated the vehicle safely until roadside assistance arrived.” But what if instead of stopping because of a cone, an autonomous vehicle drove through one? What if the “cone” had been designed to avoid detection?
This is the type of scenario Ningfei Wang, a second-year Ph.D. student in UCI’s Donald Bren School of Information and Computer Sciences (ICS), discussed this week at the 42nd IEEE Symposium on Security and Privacy (IEEE S&P 2021), a top-tier computer security conference. Wang presented the paper, “Invisible for both Camera and LiDAR: Security of Multi-Sensor Fusion based Perception in Autonomous Driving Under Physical-World Attacks.”
The work is a joint effort among researchers from UCI, the University of Michigan, Arizona State University, the University of Illinois at Urbana-Champaign, NVIDIA Research, Baidu Research and the National Engineering Laboratory of Deep Learning Technology and Application in China, and Inceptio.
“With the increased use of self-driving cars comes the need to better understand potential security threats,” says Wang. “Recognizing this, we have conducted a study of high-level self-driving car systems and discovered a vulnerability to physical-world adversarial attacks that pretend to be a benign obstacle in the roadway, but can cause self-driving cars to misdetect it and crash into it.”
Exploring a New Security Threat
The self-driving revolution might be a few years off, but with more than 40 auto brands investing in related technology and companies such as Google Waymo, Baidu Apollo Go, and Pony.ai already running self-driving services, now is the time to identify and address any potential threats.
Autonomous driving (AD) systems rely on a “perception” module to detect surrounding objects in real time. In particular, the module focuses on detecting “in-road obstacles” such as pedestrians, traffic cones and other cars to avoid collisions. Most high-level AD systems adopt multi-sensor fusion (MSF), leveraging different perception sources (including LiDAR and cameras) to ensure detection is accurate and robust. However, this team of researchers has identified a vulnerability in MSF-based systems.
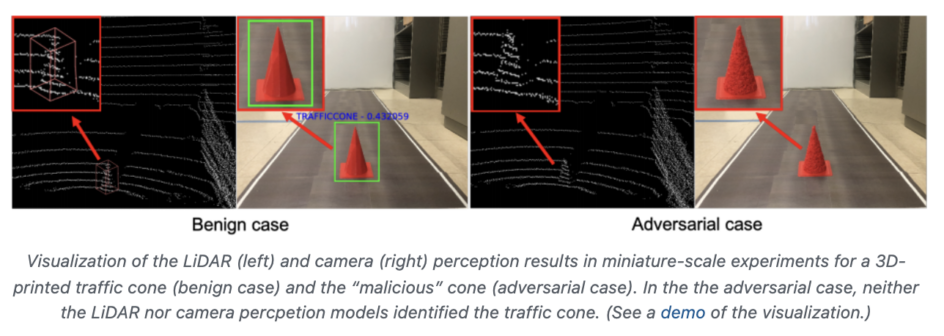
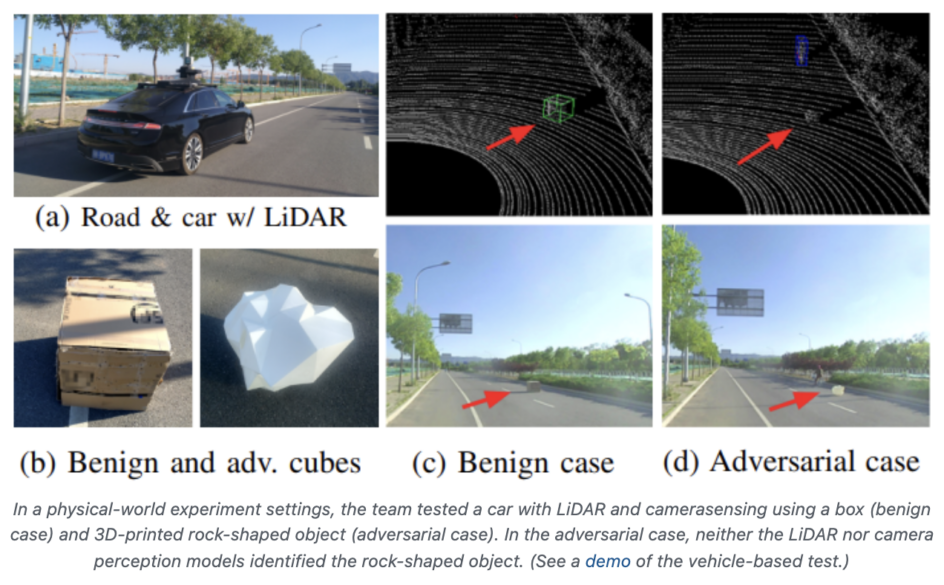
“We found that a normal road object (for example, a traffic cone or a rock) can be maliciously shaped to become invisible in both state-of-the-art camera and LiDAR detection — the two most important perception modalities for self-driving cars today,” explains Qi Alfred Chen, an assistant professor of computer science at UCI and Wang’s adviser. “This has severe safety implications for self-driving, as an attacker can just place such an object in the roadway to trick self-driving cars and cause accidents.”
Using 3D printing, the researchers created sample adversarial objects, testing them in various physical-world experiments.

“We designed a novel attack with an adversarial 3D object as a physical-world attack vector that can simultaneously attack all perception sources popularly used in MSF-based AD perception,” says Wang. “This thus fundamentally challenges the basic design assumption of using multi-sensor fusion for security in practical AD settings.” Testing in simulations and with real vehicles revealed that the printed objects could in fact fool both camera and LiDAR perception models in industry-grade AD systems.

Building a Defense Mechanism
The researchers have experimentally examined possible defense designs, decreasing the attack rate to 66%, but they continue to explore more effective strategies such as those based on adversarial training and certified robustness. As of May 20, 2021, the researchers had disclosed the vulnerability to 31 companies developing and testing AD vehicles, and 19 had indicated they are investigating the new threat. “Some already had meetings with us to facilitate their investigation,” says Chen.
The team is also building awareness and gaining feedback by presenting their work at security conferences such as IEEE S&P. “This valuable feedback will guide my further research to best address this problem,” says Wang, “and thus better ensure the security and safety of the emerging self-driving technology before wide deployment.”
— Shani Murray